Программа "Engine"
Программа "Engine" написана на языке
программирования Gambas и представляет собой математический
расчет рычажного механизма.
Посмотреть расчет механизма
Посмотреть расчет механизма
Механизм
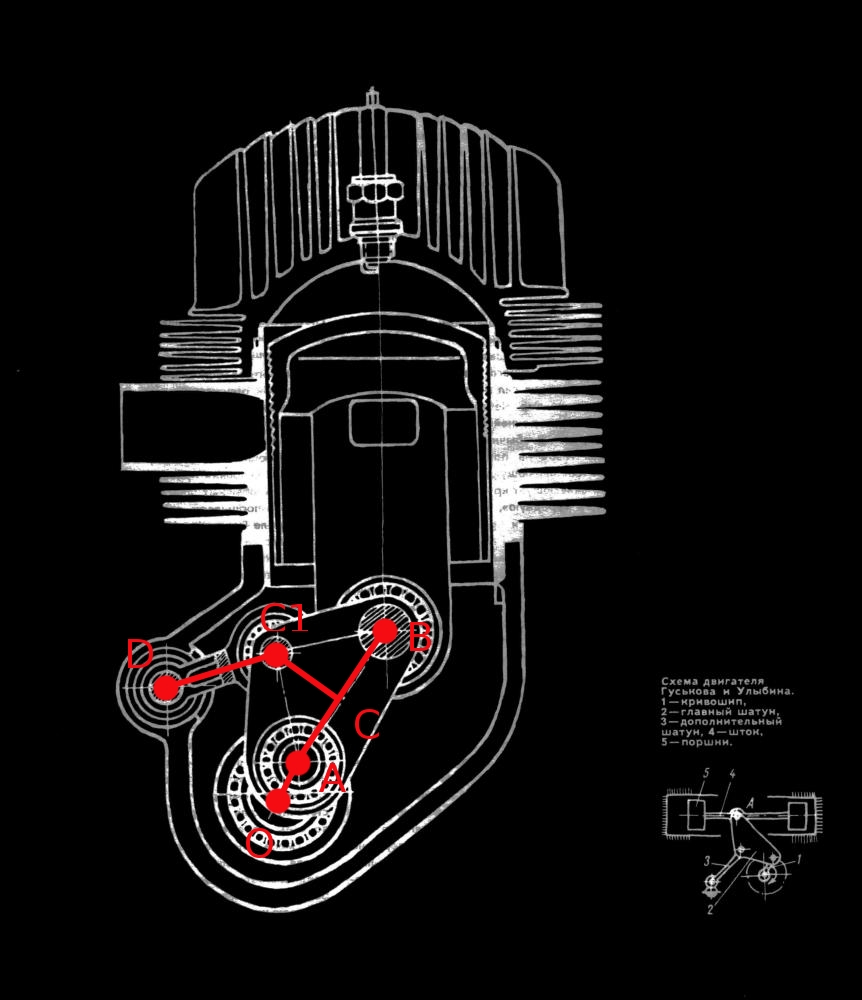
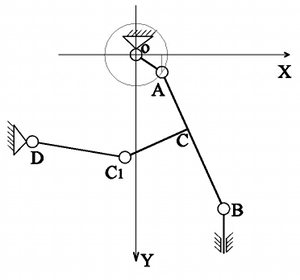
Кинематическая схема механизма (перевернуто)
Мы имеем возможность возможность производить математические расчеты с разработкой прикладных программ для автоматизации этих расчетов.
Ваши вопросы, замечания, предложения и пожелания по программе "Engine" отправляйте на электронную почту inbalt@mail.ru
Кинематическая схема механизма (перевернуто)
Этот механизм не имеет ни одной степени
свободы, а, следовательно, неподвижен. Расчеты проводились для двух
случаев:
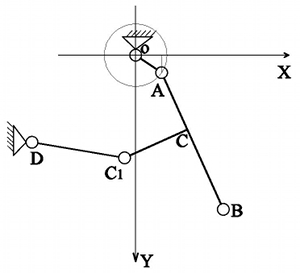
1. При отсутствии связи С1D (убрано звено С1D), определялась траектория движения точки C1.
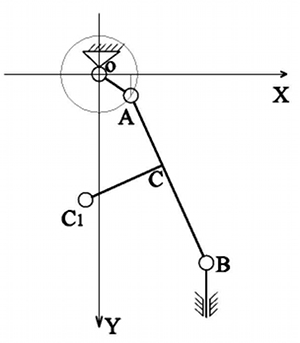
2. При отсутствии связи В - позун, определялась траектория движения
точки В.
Нами был разработан математический аппарат, выведены формулы для
расчетов и программно был смоделирован данный механизм для двух
вышеприведенных случаев.
В программе имеется возможность ввести реальные длины рычагов и визуально посмотреть траектории, описываемые свободными концами рычагов.

Траектория описываемая точкой В при отсутствии связи В - ползун
(анимация повторяется, дождитесь повторения анимации)
1. При отсутствии связи С1D (убрано звено С1D), определялась траектория движения точки C1.
В программе имеется возможность ввести реальные длины рычагов и визуально посмотреть траектории, описываемые свободными концами рычагов.
Траектория
описываемая точкой С1 при отсутствии связи С1D
(анимация повторяется, дождитесь повторения анимации)
(анимация повторяется, дождитесь повторения анимации)
Траектория описываемая точкой В при отсутствии связи В - ползун
(анимация повторяется, дождитесь повторения анимации)
Мы имеем возможность возможность производить математические расчеты с разработкой прикладных программ для автоматизации этих расчетов.
Ваши вопросы, замечания, предложения и пожелания по программе "Engine" отправляйте на электронную почту inbalt@mail.ru
| Главная |
Новости |
Программы | Цены |
Контакты |